

如果人类的视觉、听觉以及嗅觉等功能随着年龄增长而降低,那么人类对于外界环境的感知能力就会变差,会感到行动不便。
自动驾驶汽车正在沿着人类衰老这条路反向发展,期望能够拥有比年轻人类更强环境感知能力。由此看来,传感器技术的进步将直接决定自动驾驶汽车的最终状态。
目前的自动驾驶汽车传感器主要包括L2和L2 +自主性的高分辨率光学相机,以及范围和视野有限的雷达。短程声纳或雷达传感器也已用于特定的舒适和安全功能,例如自动泊车、智能巡航控制和车道保持。为了达到L3,自动驾驶汽车必须包括激光雷达传感器,这带来了许多痛点和限制,其中最重要的是成本太高。
新一代的4D成像雷达传感器在距离、速度、速度和高度4个维度上提供出色的分辨率,并提供更远距离和更宽视野的探测,所有数据都可以实时传送到自动驾驶汽车的传感器融合处理器中,这有望解决激光雷达的痛点问题。
与激光雷达和摄像头不同的是,毫米波雷达本质上可以穿透恶劣天线,且不受光照条件影响。高分辨率能够减少目标检测中的不确定性,能够在更加广泛的环境中实现更加强大的目标检测和分类。

图1 汽车雷达用例
一、雷达演进
新一代4D成像雷达与上一代3D汽车雷达不同,雷达技术原本在军事和航天航空应用中非常成熟,随着半导体技术和天线集成度的进步,使得雷达从大规模、大体积演变到能够安装在商用汽车、无人机上的小型传感器。
其中,第一个关键的技术革命是低成本毫米波雷达收发硬件的可用性,能够提供良好的发射功率和接收高灵敏度。毫米波雷达硬件的革命引发了另外两个变化,即使用MIMO天线阵列和复杂的波形设计,大大增强了角度和速度的测量。第二个关键性技术是数字信号处理IP的进步,使得能够实时处理传感器生成的多通道高速数据。
二、技术挑战
雷达技术的演进,其实是硬件和固件相互作用的结果。为了获得真正的高分辨方位角和俯仰角,雷达传感器必须使用大孔径、虚拟阵列合成技术。先进的信号处理算法可以组合跨时域、频域、码域的多种信号,或者是这些信号的组合,如TDMA、DDMA、FDMA、CDMA或者TDMA+DDMA组合。然后构建比物理阵列大得多的虚拟天线阵列,通俗地讲就是实现“通道分离”。
当前的4D成像毫米波雷达方位角分辨率不到1°,俯仰角分辨率约1°,与传统的低分辨率雷达相比,这种高分辨率可以为每个目标产生更多不相关的测量点,可以通过形成4D点云定义物体的位置和轮廓。然后,后续的雷达数据处理算法能够更加容易地分离远处的目标,并基于机器学习的算法实现目标分类与识别,类似于激光雷达和相机数据处理的分类算法。
在4D成像雷达系统中,发射波形设计对雷达传感器的性能以及整个雷达系统解决方案的总体设计具有决定性的作用。需要考虑通道分离、链路增益、角度估计等等,因此权衡这些影响因素非常重要。例如采用DDMA波形,从多个发射天线上同时(并行)发射波形,然后将在接收端产生大量的虚拟通道,后续的解码还需要使用合理的算法分离这些虚拟通道。
选择通道多路复用方法也需要权衡利弊,否则会产生多普勒和角度测量的耦合,影响最大不模糊速度的测量。另外,还有其他许多系统级的影响,如高模拟带宽和短线性调频持续时间需要很高的采样率,这会提高ADC的成本。基于相位的通道多路复用方案需要具备很高的相位分辨率的模拟移相器,但制造这种移相器存在困难,就目前TI AWR2944的移相器精度和NXP S32R45雷达芯片的移相器精度都没有做到特别低,而且还需要离线和在线校准移相器误差。最后一点是同时从多个发射天线阵元发射信号,需要在系统级实现更复杂的热设计,以消散发射器产生的额外热量。
总而言之,在汽车自动驾驶系统中利用高分辨毫米波雷达所需要考虑的因素很多,而且这些因素很重要,并非微不足道,而且这些因素才是增强毫米波雷达性能的关键因素。
三、雷达优势
雷达4D数据信息的数量和准确性的增加可以显著提高自动驾驶汽车识别物体的能力。来自雷达传感器的数据能够将来自大卡车的强反射信号和卡车附近的小孩的弱反射信号区分开,同时只需要单帧就能够实现多普勒速度的测量,以及分离不同速度运动的近距离物体的能力。
上说所有这些优势加起来可以更好地让汽车感知周围环境的情况,这意味着自动驾驶汽车可以具备更高的安全性。再加上高分辨率毫米波雷达能够在能见度差的条件下和光照复杂的杂乱场景中运行,自动驾驶系统可以在更广泛的条件下以更高的安全性和可靠性运行,这正是自动驾驶汽车行业正在努力实现的目标。
四、解决方案
4D成像雷达的挑战需要雷达SOC提供灵活而全面的解决方案,该解决方案既是”软件定义的“,又可以扩展以支持先进的雷达信号处理算法,这样的平台包括高性能DSP驱动,用于多维度FFT操作的优化硬件加速器以及专用的软件开发套件。
CEVA公司提供的SensPro传感器集成架构与一系列DSP产品组合,提供一系列处理能力。凭借其通用架构,DSP软件代码在内核之间简单平稳的迁移,节省了对先前开发的软件代码库的投资,并缩短了上市时间。
当然,底层处理能力必须跟上新兴需求的步伐,因此需要可编程架构。随着市场需求的发展,CEVA不断优化其SensPro架构和指令集,以支持以下功能:
(1)使用先进的CFAR方案(例如OS-CFAR)进行可靠和强大的目标检测;
(2)支持增强分辨率,超越“傅里叶极限”,采用超分辨率高级算法;
(3)通过处理雷达点云来支持帧间级处理,以实现高级跟踪方案(例如,使用卡尔曼滤波器和应用专用AI模型,训练用于从“后跟踪器”点云中分割和分类对象)
整个处理架构如下图所示:
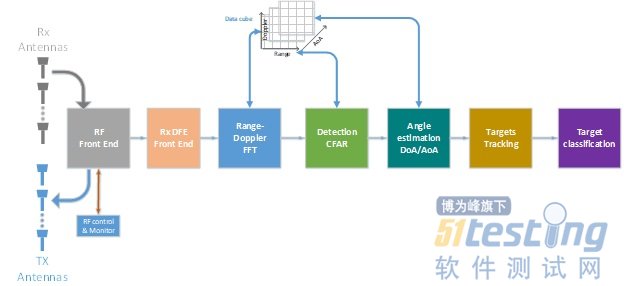
图2 SensPro DSP 雷达处理链
随着部署的毫米波雷达的车辆数量越来越多,干扰的可能性也在增加,这将推动单个雷达传感器波形设计的创新,并希望出现车载雷达的相关标准。
标准的出现可以让雷达传感器作为大规模分布式信息网络中的全新角色,目前汽车雷达的传输缺乏商定标准,因此需要一种具有高度可编程的解决方案来适应。
这可能包括能够在单个传感器级别上实现干扰缓解,或者在传感器和基础设施之间添加协调机制,以便于传感器能够以安全有效的方式利用共享频谱。同时,底层半导体技术、天线设计和算法开发的持续进步也将跟上这些新兴想法的步伐。
自动驾驶乘用车远非这些雷达传感器的唯一应用,显然还有许多其他类型的车辆可以在广泛的操作设计领域受益于自动驾驶或高级驾驶员辅助,特别是随着雷达传感器的尺寸和成本下降。但这些优势对于固定应用同样重要。
基本上,高分辨率毫米波雷达传感器将在了解动态环境很重要且视觉相机数据不足的任何情况下得到应用。雷达的技术有足够的空间来发展以满足新的要求,其应用的限制可能只是系统设计人员的创造力。
本文内容不用于商业目的,如涉及知识产权问题,请权利人联系51Testing小编(021-64471599-8017),我们将立即处理












