

从智能辅助驾驶汽车的整车级需求出发,来制定自动驾驶域控制器的HIL台架测试技术方案。智能辅助驾驶汽车中涉及辅助驾驶的传感器包括毫米波雷达,超声波雷达,激光雷达,GNSS,IMU,摄像头等。激光雷达用于建立周围环境的精确3D图像;雷达通过电磁波不同波段测量车辆到目标的距离;摄像头用于识别路标和检测颜色;高分辨率地图用于定位;惯性测量单元IMU它测量运动、加速度和旋转速度的基本物理量等等。

1.自动驾驶域控制器的功能定义
自动驾驶域控制器,是实现智能辅助驾驶的载体,它承担了自动驾驶所需要的数据处理运算力,包括但不限于毫米波雷达、超声波雷达、摄像头、激光雷达、GNSS、惯导等设备的数据处理,也承担了自动驾驶下,底层核心数据、联网数据的安全。能实现的功能如:ACC自适应定速巡航、FCW前碰预警、AEB自动紧急制动、 TSR交通标志识别、 BSD盲区监测、 LCA变道辅助、 LDW车道偏离预警、LKA车道保持辅助等等。涉及的关键技术包括:感知+决策+执行+交互四大技术。
自动驾驶域控制器的主要功能定义接口包括:CAN/CANFD接口、电源输入、超声波雷达信号输入(PSI5)、摄像头信号输入(LVDS(GMSL))、毫米波雷达信号输入、激光雷达信号输入、车载以太网通信接口、GNSS及IMU的信号输入、数字量信号输入输出、模拟量信号输入输出等等;
控制器主要架构包括SOC芯片及其外围电路+MCU芯片及其外围电路+通信接口+电源电路。SOC芯片的主要接口包括摄像头信号输入(LVDS(GMSL))、CAN/CANFD、RS232、RS485、车载以太网接口等等。MCU芯片接口主要包括:CAN/CANFD、车载以太网接口、LIN、数字量信号输入输出、模拟量信号输入输出等等;模拟AD/DA信号:如方向盘转角、制动压力输入等;数字I/O信号:如AEB、ACC功能开关;CAN信号:与车身各个传感器、执行器、各个控制器的交互信息。

SOC芯片:负责摄像头图像的处理以及驾驶员的状态监控;负责超声波雷达信号处理;摄像头、毫米波雷达和激光雷达等多源传感器数据融合;车载以太网与内部网关实现内部通信;
MCU芯片:监控系统的运行状态,并对外进行通信。为什么需要加入一颗MCU芯片呢?主要原因是SOC芯片大多尚不能满足高功能安全等级的要求。因此,还需要搭配一颗功能安全级的MCU芯片,用于满足安全监控、安全停车等高功能安全需求的应用场景。
在整个智能驾驶解决方案中, MCU 需满足功能安全 ASIL D要求,有多路CAN总线接口和高速以太网接口,能与车身传感器连接,并接收和发送车身CAN总线和以太网信息,从而实现域控平台与整车其它节点进行交互。
MCU主要支持的功能如下:对车辆的执行命令进行校验处理,并对接其他域的控制功能;供电模块状态、通信状态、以及交互节点状态的监控等;当监测到自动驾驶系统发生故障时,担负起功能降级、驾驶员接管提醒、安全停车的作用。
2.HIL台架技术的总体思路
HIL台架测试柜里的设备通过仿真模拟产生雷达信号、视频信号、激光信号、位置信号,并将这些信号输入给外界的真实控制器,控制器根据内部芯片里集成的算法,进行路径规划和决策,转而通过总线将指令发送回给测试柜里的虚拟车辆,控制虚拟车辆的运动,形成闭环。

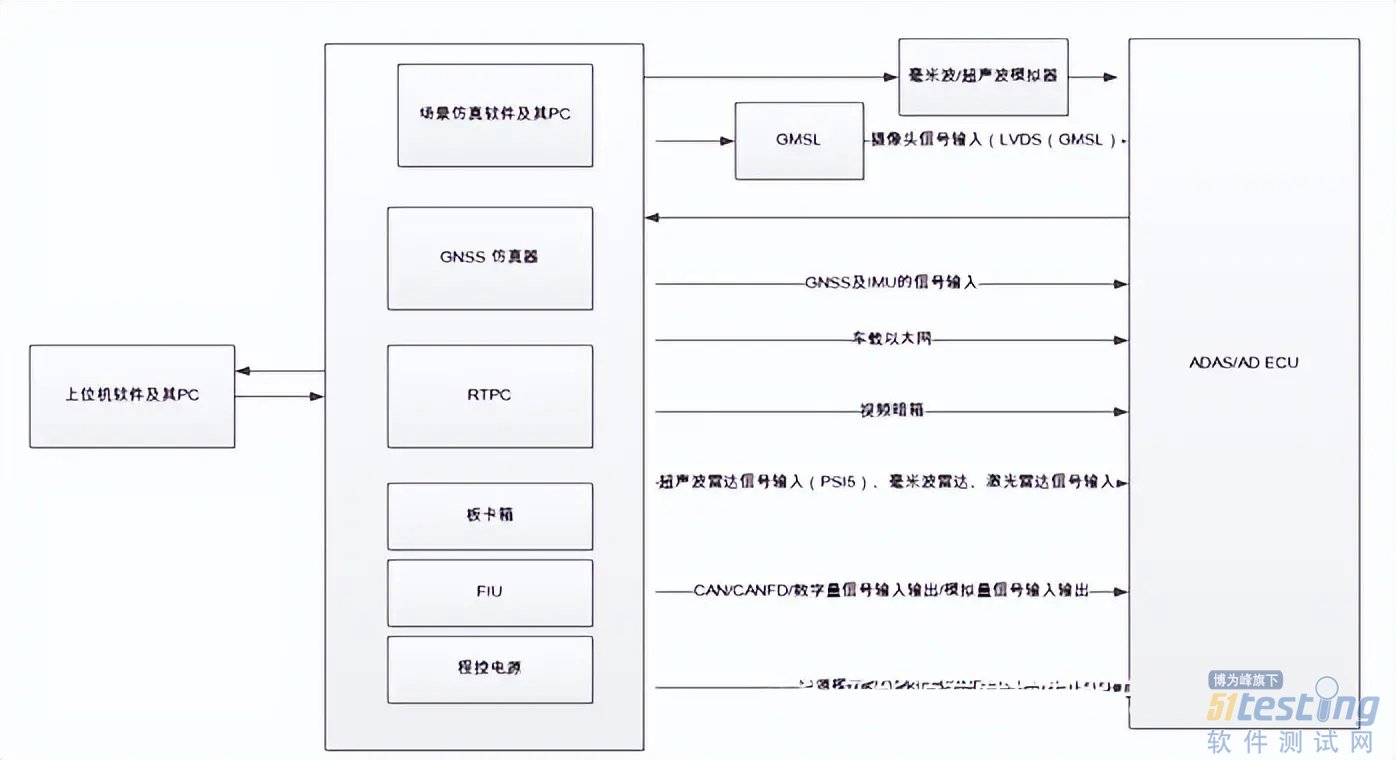
HIL测试系统主要包含RTPC、上位机、场景软件仿真及其PC、CAN卡、车载以太网卡、视频注入卡、GNSS模拟器、摄像头目标模拟器、毫米波雷达模拟器、超声波雷达模拟器、激光雷达模拟、程控电源、故障注入单元FIU等硬件设备。传感器模型和场景模型运行在场景软件仿真及其PC上,自动驾驶仿真软件支持激光雷达、摄像头、 毫米波雷达、超声波雷达、GPS、IMU等在内的各种传感器的精确模拟,同时可以模拟光照强度、雨雪天气、雾天视野等天气环境。整车动力学模型、理想传感器模型RTPC上;上位机用来创建测试工程、显示测试过程和分析测试结果,ADAS控制器输出的视频流也会传输到操作PC上进行显示和记录。
3 HIL台架仿真模拟信号设备的选择
测试过程中,信号分为三个层级:外界环境信号、目标环境传感器输入信号、目标环境传感器输出信号。外界环境信号就是真实的环境信号,通过传感器去感知的外界信号;目标环境输入信号,是未通过摄像头,直接将每个摄像头的采集结果数据作为输入信号。而目标环境信号则是传感器融合完成后的信号,一般是CAN或者车载以太网传输的信号。以摄像头信号为例,通过视频暗箱得到的信号为外界环境信号,通过视频注入的信号为目标环境输入信号,通过处理后给到总线上的是目标环境传感器输出信号。因此,针对给到控制器不同层级的信号测试配置描述了模拟传感器数据的不同方法。测试设备可以将数字数据注入传感器通道以模拟传感器输入。或者,测试设备可以以摄像机图像或雷达回波模式的形式开发传感器输入,以模拟实际感测数据。

01 摄像头 Camera
摄像头一般由镜头(Lens),图像传感器(Image Sensor),图像信号处理器(Image Signal Processor, ISP),串行器发送(Serializer)组成。一般步骤是,镜头采集到物体的基本信息然后由Image Sensor进行一定处理后再交于ISP处理之后串行化传输。传输方式同样可分为在同轴电缆或双绞线上基于LVDS传输或者直接通过以太网传输。车载摄像头分为单目和双目,用于环境感知。
HIL仿真技术方案:
1.目标环境传感器输入信号注入法:这个方案实际上是把传感器的探头和摄像头的镜头拿掉,将虚拟视频直接处理后注入控制器,车辆前方的图像或者视频数据,并不能直接传输给控制器使用,因为控制器能接收的视频数据是有格式要求的。因此,这些传感器数据必须经过处理才可以导入到控制器中去。但是很多摄像头厂家不开放视频通信协议,导致无法进行。它的优点在于可以模拟不同的镜头仿真。由于多目和鱼眼摄像头畸变、视场角比较大,因此是无法通过视频暗箱进行仿真,只能用该方法。
2.外界环境信号注入法:采用真实的摄像头,摄像头采集到的视频信号会根据自己内部的处理单元将数据处理后发送给控制器,是真实的摄像头数据。方法是在仿真软件输出的前方道路的画面在显示屏上播放,正前方放置真实的摄像头,去采集显示屏里的画面。这个显示屏和摄像头放到暗箱里,称为视频暗箱,这种方式容易实现,但是易受光线和显示器的影响。

02毫米波雷达 Radar
雷达本质是电磁波,信号被其发射路径上的物体阻挡继而会发生反射。通过捕捉反射的信号,可以确定物体的距离、速度和角度,毫米波雷达的测距和测速原理都是基于多普勒效应。毫米波雷达可发射波长为 1-10mm,频率 30-300GHZ 的电磁波信号。被广泛应用于车载距离探测,如自适应巡航、碰撞预警、盲区探测、自动紧急制动等。

HIL仿真技术方案
1.目标环境传感器输入信号注入法:直接通过模拟软件输出目标列表给控制器,这种方法被称为数据注入法,比较容易实现;
2.外界环境信号注入法:也就是上述毫米波雷达的模拟方案。通过微波在空间反射时间的延迟判断距离, 通过反射波形的频移判断对象是在接近还是在远离。所以在特制的毫米波雷达暗箱中, 同样可以通过毫米波发射器发射信号,让真实毫米波雷达去接收这些信号。
03超声波雷达 Ultrasound
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。常用探头的工作频率40kHz, 48kHz 和58kHz 三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故在倒车雷达上多采用40kHz 的探头。超声波雷达对少量的泥沙遮挡的影响较小。探测范围在0.1-3 米之间,而且精度较高。

HIL仿真技术方案:
外界环境信号注入法:超声波探头进行回波,把检测到的超声波信号再利用模型计算出反射时间,再给到超声波这个回波,同时可支持多个超声波传感器,这样就可以做自主泊车、半自主泊车等测试。
04激光雷达LIDAR
激光通过测定传感器发射器与目标物体之间的传播距离,分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,从而呈现出目标物精确的三维结构信息。激光雷达的结构分为机械式、MEMES、相控阵OPA。通过旋转将激光点变成线,通过64线堆叠将线转化为面,得到点云数据获取3D环境信息。激光雷达可以用于测量物体距离和表面形状。其测量精度可达厘米级。

HIL仿真技术方案:
1.目标环境传感器输入信号注入法:系统通过导入点云数据,设置点云参数,模拟激光点云回波信号。
2.外界环境信号注入法:系统通过网络接入整车硬件在环(HIL)系统,实时接收场景产生软件生成的目标点云参数,进行目标回波的实时仿真。数据可以由仿真软件中的激光雷达模型来采集周围场景,并直接将采集到的点云数据发送给车载控制器。
05全球导航卫星系统GNSS
GNSS的基本原理是测量出已知位置的卫星到用户接收机之间的距离,综合多颗卫星的数据就可知道接收机的具体位置。GNSS系统目前已经具备极高的响应速度和定位精度,也有非常可靠的稳定性。行业主流GNSS模组的TTFF速度目前已经提升为秒级,定位精度也从十米级、米级提升为亚米级、分米级甚至厘米级。GNSS车载模组能够为自动驾驶、远程驾驶提供了可靠的定位、导航和测距数据来源,是高级驾驶辅助系统不可或缺的组成部分。

HIL仿真技术方案:
外界环境信号注入法:硬件在环是一种测试方法,其中,被测设备或系统(DUT或SUT)被嵌入到模拟器系统中,该模拟器系统主要实时地模拟设备或系统的真实环境,允许在闭环中实时评估其在整个系统中的性能。HIL测试中的一部分是GNSS卫星信号的仿真。为此,使用了GNSS模拟器,如下图所示:

GNSS模拟器都可以实时进行远程控制,可以集成到动态HIL环境中。在GNSS HIL仿真器中可指示位置数据和动力学参数,例如速度,加速度和加加速度,而GNSS模拟器可实时且无信号中断地调整仿真的运动,还可处理HiL仿真的车辆姿态信息,例如俯仰,侧倾和偏航值。
06惯性测量单元IMU
检测和测量加速度与旋转运动的传感器,包括加速度计和角速度计。原理:加速度计工作原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量)。角速度计工作原理是利用了角动量守恒原理。

HIL仿真技术方案:
目标环境传感器输出信号注入法:通过串口的方式注入数据。
07 高精度地图
高精度地图由含有语义信息的车道模型,道路部件,道路属性等矢量信息,以及用于多传感器定位的特征图层构成。高精度地图可以看作是一种特殊的传感器。在高精度地图辅助下更容易判定自车位置,可行使区域,目标类型,行驶方向等。定位,感知及规划都依赖高精度地图。

HIL仿真技术方案:
目标环境传感器输出信号注入法:通过CAN/车载以太网的方式注入数据。
本文内容不用于商业目的,如涉及知识产权问题,请权利人联系51Testing小编(021-64471599-8017),我们将立即处理












