

一、车载毫米波雷达的目标检测性能测试综述
做测试其实只需要明白两个问题:A、要测什么。B、怎么测(测试的环境、流程、方法、设备这些的要求是什么)。做测试是要把产品真实的(正确的)性能参数测出来,并不需要对这些测试结果的优劣负责。
车载毫米波雷达的目标检测性能测试主要是测量如下参数:
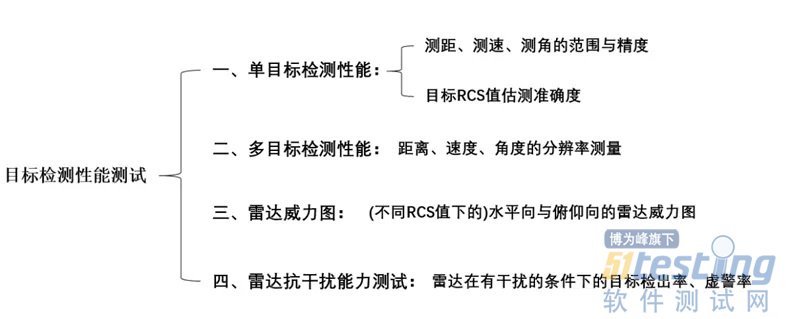
图1.1车载毫米波雷达目标检测性能测试项目
此外便是测试的环境、流程、方法与设备:测试需要在全电波暗室中进行,关于暗室的了解,可以参考我之前的博文:关于微波暗室_墨@#≯的博客,测试的设备主要是雷达目标模拟器,整个测试的框架图如下:
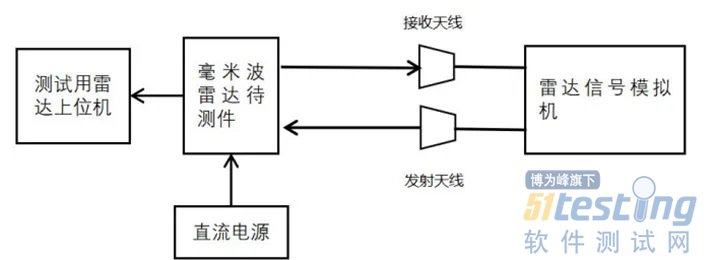
图1.2基于雷达模拟器的毫米波雷达目标检测性能测试架构
值得说明的一点是:在参考资料1的征求意见稿中(或者我们暂定它已经是国标了),里头也给出了各类型车载毫米波雷达的性能参数要求:
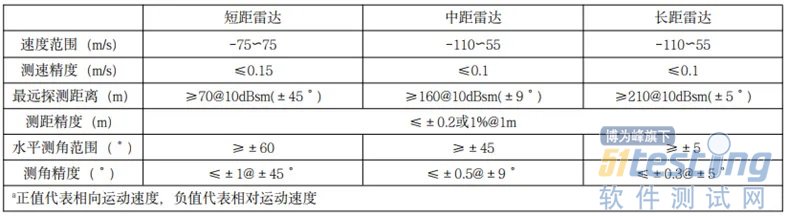
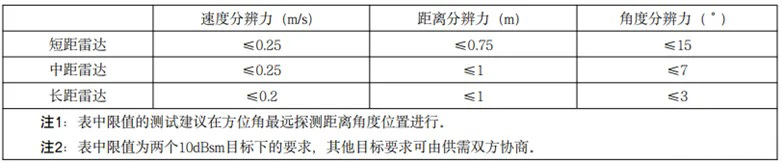
图1.3征求意见稿中的雷达目标检测性能参数要求
上面两图包含了对各类型雷达的距离、速度、角度的测量范围、精度以及分辨率的要求,此外,雷达最小作用距离的要求是不大于0.6m。以上参数现阶段还不是国标,此外即便成为了国标,这些需求参数其实也只是行业的最低标准,具体的要求应该来自下游需求方。
这里在做几点关于性能参数的补充说明:
关于距离:我们测量范围的考量其实包括法线方向的测量范围、以及大角度下的测量范围,这也是我们去测量雷达威力图(不同角度下的雷达最远检测范围)的原因。测距分辨率和精度我们是测量法线方向的值。
关于速度:速度精度和分辨率的测量我们也是测法线方向。
关于角度:我们去评价测角范围时,更定量的评价应该是:在xx米下的FOV(其实这个参数也可以从雷达威力图中得到)。
二、关于雷达目标模拟器
雷达目标模拟器作为目标检测性能测试中最重要的一个设备,本着知其所以然的态度或者单纯的感兴趣的角度,我们可以对之做一定的了解。
2.1雷达目标模拟器简介
简单来说,雷达目标模拟器是一种用以模拟目标回波的设备,其系统架构如下:
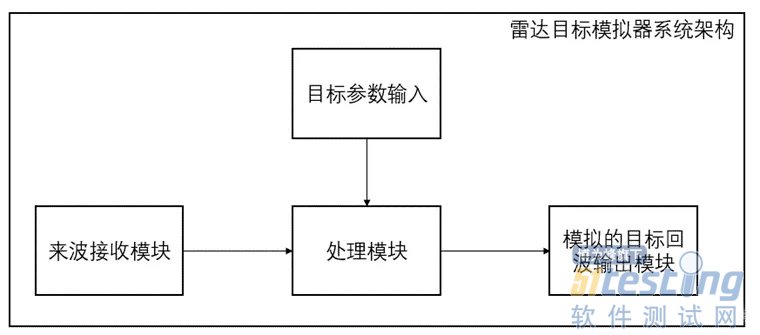
图2.1雷达目标模拟器的系统架构
其大致的处理脉络为:来波接收模块外接接收天线,接收雷达(待测设备)的来波,并将之进行下变频等处理。处理模块基于目标的参数(目标距离、速度、RCS值等)输入(可以来自上位机的交互界面、也可以来自其它仪器设备)做相关的信号和数据处理,将目标信息加载到来波接收模块的中频/视频信号中。目标回波输出模块则是基于处理模块的信号将之进行上变频等操作经过外接的发射天线把模拟的目标回波发射出去。
2.2雷达目标模拟器的原理简介
上面一节把流程大致讲清楚了,要明白其原理,关键在于弄清楚信号处理模块是怎么实现的。本节内容并不试图将原理细节及其实现讲清楚,作为雷达目标模拟器的使用者而非研发者,能理解个大概就差不多了。
如果对车载雷达信号处理(测距、测速、测角原理)以及雷达方程有一定了解,不难理解的是:其实本质上,雷达目标模拟器是一个对来波进行延时(模拟目标距离)、调频(模拟目标速度)、调幅(模拟目标RCS值)的“复读机”。来波是什么,它也发射什么,只是做了一些带有目标信息的微调,而至于怎么去延时、怎么去调频(或者说增加一个多普勒频率),怎么去调幅,读者可以看看参考资料,本博文不做更多说明。
2.3雷达目标模拟器的评价指标
雷达目标模拟器对于单目标,可以模拟该目标的距离、速度、RCS值,(对于角度,加个转台就可以了,不管是转待测的雷达还是转雷达目标模拟器发射天线的位置),如果雷达目标模拟器有多个发射天线(通道),那自然也可以模拟多目标的场景(各发射通道相互独立,每个通道模拟该通道所设置的目标参数即可)。
用于雷达目标模拟器的评价,主要有如下参数:
1. 支持的频率范围和带宽
2. 可模拟目标的最近距离(因为要经过数字端的一些计算,所以如果距离太近,时延满足不了要求,所以雷达目标模拟器其实无法模拟极近距的目标)、距离步进、距离精度、最远距离。
3. 可模拟目标的速度范围、速度步进、速度精度。
4. 可模拟目标的角度范围、角度步进、角度精度。(不过如前所述,角度这个参数是通过转台来实现的,这里的指标起决定作用的还是机械转台的参数。)
5. 目标RCS的动态范围。(可以模拟多小以及多大dBsm的目标)。
6. 可以同时模拟的目标数量。(取决于发射通道个数)
7. 目标更新周期。
当然,主要还是从具体的测试需求出发,基于需求的满足情况和成本预算去到市场上挑产品。
2.4雷达目标模拟器的使用简介
本节内容不是介绍雷达目标模拟器具体怎么使用,我了解到的几款产品其实用户交互做得很简洁了,上手很简单。本节提供应用场景的介绍:
在2.1节中提到,雷达目标模拟器的参数设置可以来自上位机的交互界面、也可以来自其它仪器设备。单纯的测量雷达的目标检测性能参数是该仪器的一个重要应用场合。还有一些更高级点的应用:当我们基于雷达的检测结果去做ADAS域控测试时,也可以用到该设备,一种MIL(模型在环)的测试架构如下:
图2.2雷达+域控的模拟系统架构图
你可以设计场景(乃至可以坐上去开…),场景仿真平台会把目标信息给到雷达模拟器,然后“装在”车上的雷达(实际上雷达处在雷达目标模拟器前面),会把检测到的结果给到HIL机柜,机柜里可以放域控器,从而可以做毫米波雷达的ADAS功能的仿真或者对域控里的算法进行验证。
2.4其它
了解到的国内外设备厂家:
国外:是德科技、罗德与施瓦茨。(4D雷达目标模拟器)
国内:(做军用的比较多?)华清瑞达、理工雷科、经纬恒润、华力创通、成电和西电也都有做的。
有些产品内部自带暗室腔,有些没有,需要去到专门的暗室中测量。如果要测量雷达的目标检测性能,除购买外,应该有一些设备短租的服务,或者直接给到测试机构帮忙做?
三、性能测试的流程与方法
具体的流程与方法是有较为严格的规范的,不过截止目前还并没有形成国标?其流程和方法并不复杂,但需要捋清楚细节,不能漏东西。
四、总结
本博文梳理了关于雷达目标检测性能测试的内容,包括需要测试的参数、测试的环境、设备以及流程方法,更具体的细则还需要读者自己进行研读,内容相对简单,但是较为繁琐没有放在本博文的内容里了。此外,本文还对雷达目标模拟器这一重要的测试设备进行了介绍。希望以上内容可以对感兴趣的读者的工作开展有所帮助,后续我会随着积累的不定期加深丰富本博文内容。

本文内容不用于商业目的,如涉及知识产权问题,请权利人联系51Testing小编(021-64471599-8017),我们将立即处理












