


3 仿真分析
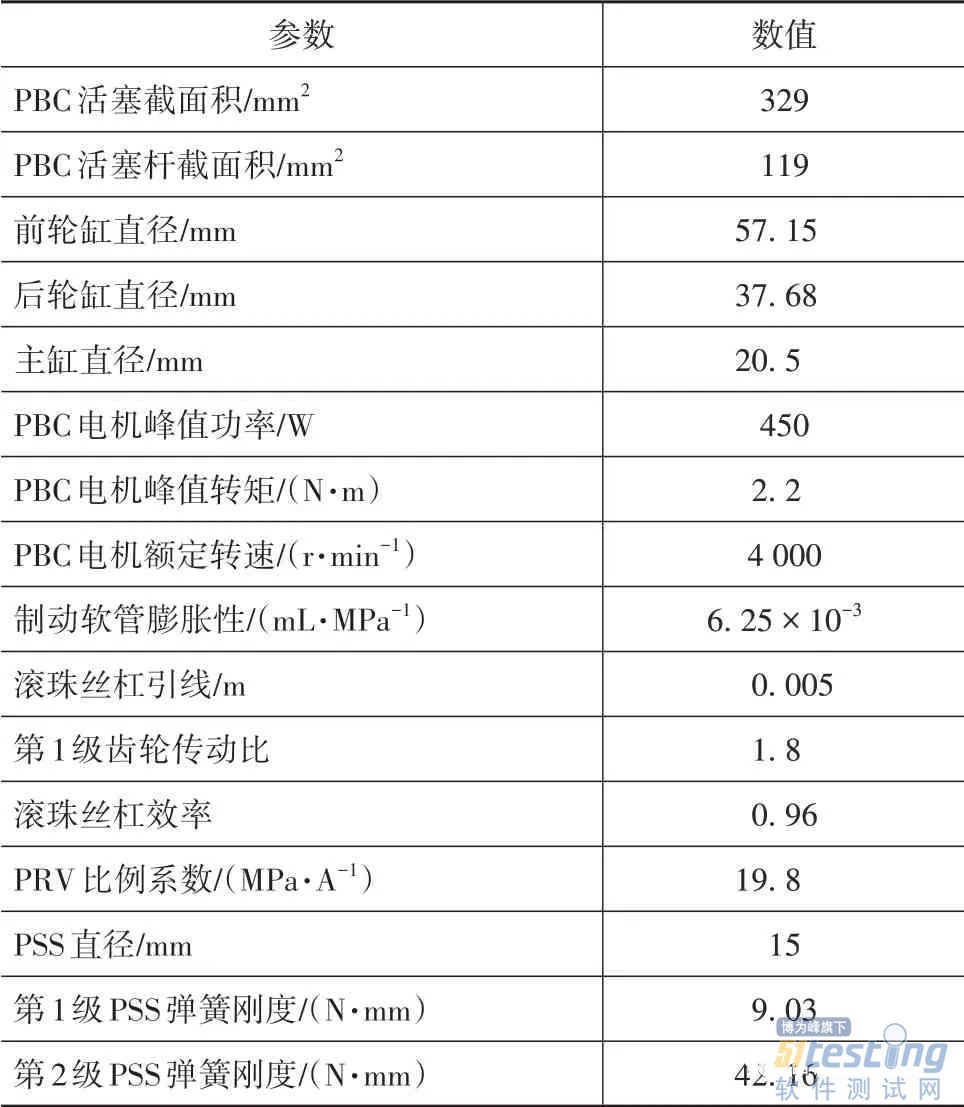
为验证上述变等效活塞截面积控制方法及压力控制算法有效性,搭建离线仿真平台进行测试,为了便于向硬件在环仿真平台移植,车辆动力学、液压制动系统和电动动力总成等模型均在Simulink中建立,未使用其他仿真工具进行联合仿真。仿真中所用主要参数见表1。
表1 主要参数
3.1 常规制动压力控制仿真分析
为验证在变等效活塞截面积控制方法下PBC的压力调节性能,首先进行PBC增压试验。试验过程中,PBC活塞以固定速度移动,控制器通过调节电磁阀来切换压力调节模式,模式切换后,活塞运动方向改变,但速度保持不变。仿真结果如图10~图13所示。

图10 PBC的压力曲线

图11 PBC压力调节模式曲线

图12 PBC活塞位移曲线
由图10~图13可见,随着压力逐渐增加,压力调节模式从低压切换到中、高压,虽然压力调节模式发生了变化,但制动压力并未发生突变,而是平稳增长。同时根据压力变化趋势,从低压切换到中、高压时,增压率逐渐下降,这是由于中压和高压模式下的等效活塞截面积比低压时小,而活塞以固定速度移动,因此PBC排出油液体积较小,导致增压率降低。

图13 PBC推杆力曲线
此外,尽管压力变化较大,但推杆力绝对值变化很小,与中压模式相比,高压模式下的推杆力甚至有所下降。这是因为高压模式下,活塞的等效截面积较小,使得在相同推杆力下,活塞可以产生更高的压力。因此,这种可变活塞横截面积控制方法可以减少PBC电机输出转矩范围,并降低其性能要求,延长其使用寿命。
为了满足制动压力的响应需求,结合工程经验,通常要求系统在0~10 MPa压力范围内的增压时间不大于150 ms,超调量不大于5%。为了验证常规制动时压力控制算法的控制精度,进行了随机压力跟随测试,同时与工程中最常用的PID算法进行对比试验。仿真结果如图14和图15所示,可以看出与PID算法相比,本文算法可以更快速准确的跟随目标压力,尤其在压力发生突变时,其响应时间在100 ms以内,超调量小于3%,完全满足系统压力响应需求。

图14 常规制动压力控制效果

图15 常规制动压力控制误差
3.2 冗余制动压力控制仿真分析
冗余制动模式下,RBU通过调整压力调节阀PRV线圈电流实现精确压力控制。为了验证RBU压力控制算法的控制效果,同样进行随机压力跟随测试试验并与PID算法进行对比。仿真结果如图16和图17所示,可以看出与PID算法相比,RBU压力控制算法可以更快速准确地响应目标压力,同样在压力发生突变时效果更明显,其响应时间在120 ms以内,超调量小于4%,这意味着该线控制动系统在冗余制动模式下仍可以保持较高的制动性能。不过这种控制方法需要液压泵频繁工作,且噪声较大,因此只应用于MBU发生单点故障时。

图16 冗余制动压力控制效果

图17 冗余制动压力控制误差
本文内容不用于商业目的,如涉及知识产权问题,请权利人联系51Testing小编(021-64471599-8017),我们将立即处理











