

为什么要进行标定?
一辆自动驾驶车辆会安装多个传感器,需要通过传感器标定来确定相互之间的坐标关系,从而将多个传感器数据整合为“一个传感器”。因此,准确的传感器标定是实现智能车辆多传感器感知和定位系统的先决条件。
传感器标定的基本原理是将已知的被测量(亦即标准量)输入给待标定的传感器,同时得到传感器的输出量,对输入量和输出量进行对比处理,得到一系列表征两者对应关系的标定曲线,进而得到传感器性能指标的实测结果。
分类
传感器标定分为内参数标定和外参数标定:
内参数是传感器自身固有性质,决定传感器的内部映射关系,如Camera的焦距和镜头畸变、Lidar内部激光发射器坐标与激光雷达坐标装置之间的转换关系;
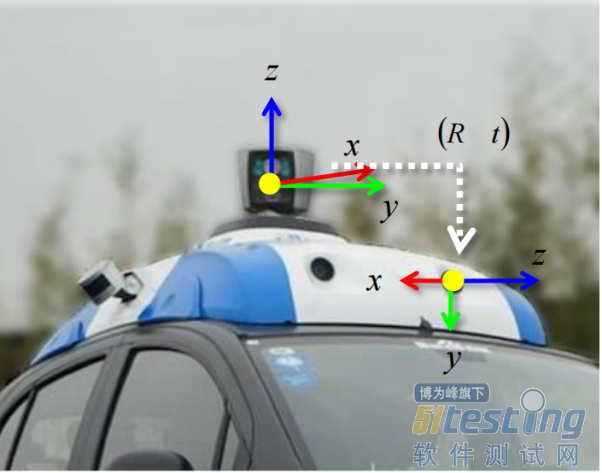
而外参指的是传感器相对位置朝向对于世界坐标系的旋转和平移变换关系,通常用三维的旋转矩阵R3×3(3个自由度)和平移向量T3×3(3个自由度)共6个自由度表示,以确定传感器与外部坐标系之间的转换关系。
大多数传感器在安装后需要进行标定,以确保传感器测量的准确性。
关于坐标系
以Camera为例,其涉及的坐标系包括像素坐标系、图像坐标系、相机坐标系和世界坐标系,标定就是为了获取以上四大坐标系之间的对应关系,即获取外参矩阵。
在标定的时候,如果物体在距离相机的不同位置,那么我们就必须在不同的位置对相机做标定。
简单点来理解就是,当物体离相机远的时候,在图像上就很小,那么一个像素代表的实际尺寸就大,当物体离相机近的时候,那么成像效果就大,一个像素代表的实际物体尺寸就小。因此,对于每一个位置都需要去标定。
本文源自第六十九期《51测试天地》
《智能驾驶视觉传感器标定测试》一文
查看更多精彩内容,请点击下载:
版权声明:本文出自《51测试天地》第六十九期。51Testing软件测试网及相关内容提供者拥有51testing.com内容的全部版权,未经明确的书面许可,任何人或单位不得对本网站内容复制、转载或进行镜像,否则将追究法律责任。











